#include <obj_defs.h>
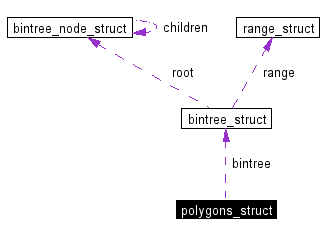
Collaboration diagram for polygons_struct:
Data Fields | |
| Colour_flags | colour_flag |
| Colour * | colours |
| Surfprop | surfprop |
| float | line_thickness |
| int | n_points |
| Point * | points |
| Vector * | normals |
| int | n_items |
| int * | end_indices |
| int * | indices |
| Smallest_int * | visibilities |
| int * | neighbours |
| bintree_struct_ptr | bintree |
Definition at line 101 of file obj_defs.h.
|
|
Definition at line 129 of file obj_defs.h. Referenced by copy_polygons(), create_polygons_bintree(), delete_polygons(), find_closest_point_on_object(), find_closest_polygon_point(), find_closest_vertex_on_object(), initialize_polygons(), and intersect_ray_with_object(). |
|
|
Colours may be specified for entire set (colour_flag == ONE_COLOUR) or per item. The colour array is dynamically resized to match Definition at line 105 of file obj_defs.h. Referenced by colour_code_object(), delete_polygons(), get_polygons_colours(), half_sample_sphere_tessellation(), half_sample_tetrahedral_tessellation(), initialize_polygons(), io_polygons(), remove_invisible_polygons(), set_polygon_per_item_colours(), and subdivide_polygons(). |
|
|
|
|
|
Definition at line 108 of file obj_defs.h. Referenced by initialize_polygons(), and io_polygons(). |
|
|
|
|
Definition at line 128 of file obj_defs.h. Referenced by check_polygons_neighbours_computed(), copy_polygons(), find_next_edge_around_point(), free_polygon_neighbours(), get_polygon_edge_angle(), initialize_polygons(), make_polygons_front_facing(), and reverse_polygons_vertices(). |
|
|
|
|
Definition at line 107 of file obj_defs.h. Referenced by get_polygons_surfprop(), half_sample_sphere_tessellation(), initialize_polygons(), and io_polygons(). |
|
|
Definition at line 127 of file obj_defs.h. Referenced by copy_polygons(), create_polygons_visibilities(), delete_polygons(), get_point_polygon_distance_sq(), get_point_polygon_vertex_distance(), initialize_polygons(), intersect_ray_polygon(), and set_polygons_visibilities(). |
 1.3.7
1.3.7